เปิดมุมมองใหม่ของการเรียนรู้หุ่นยนต์อัตโนมัติด้วย QLabs Virtual แพลตฟอร์มจำลองเสมือนจริง
เปิดมุมมองใหม่ของการเรียนรู้หุ่นยนต์อัตโนมัติด้วย QLabs Virtual แพลตฟอร์มจำลองเสมือนจริง


ขอแนะนำ Quanser Interactive Labs (QLabs Virtual) แพลตฟอร์มจำลองหุ่นยนต์เสมือนจริงที่ทันสมัย สร้างขึ้นบน Unreal Engine (กราฟฟิคคอมพิวเตอร์แบบสามมิติ) ที่ช่วยให้นักเรียนและนักวิจัยสามารถพัฒนา ทดสอบ และเรียนรู้ระบบหุ่นยนต์อัตโนมัติได้อย่างมีประสิทธิภาพ โดยไม่ต้องพึ่งพาฮาร์ดแวร์จริง
QLabs Virtual คืออะไร?
QLabs Virtual คือ แพลตฟอร์มจำลองหุ่นยนต์เสมือนจริงล้ำสมัยที่พัฒนาโดยใช้ Unreal Engine (กราฟฟิคคอมพิวเตอร์แบบสามมิติ) ซึ่งออกแบบมาเพื่อเปลี่ยนวิธีที่นักวิจัยและนักศึกษาพัฒนาหรือทดสอบสถานการณ์และอัลกอริธึมต่างๆ ด้วยหุ่นยนต์จาก Quanser โดยผู้ใช้สามารถเข้าถึง “Digital Twin” หรือแบบจำลองดิจิทัลของระบบ Quanser ได้โดยตรงผ่านคอมพิวเตอร์ ไม่ว่าจะอยู่ที่ใดหรือเวลาใดก็ตาม ทำให้สามารถเรียนรู้และพัฒนาได้อย่างต่อเนื่อง
ปัญหาของการวิจัยหุ่นยนต์แบบเดิม มักเจอกับข้อจำกัด เช่น ชั่วโมงใช้งานห้องปฏิบัติการที่จำกัด ความเสี่ยงต่อความเสียหายของอุปกรณ์ และขั้นตอนการติดตั้งที่ซับซ้อน QLabs Virtual ช่วยขจัดอุปสรรคเหล่านี้ด้วยการจำลองระบบหุ่นยนต์ทางจลนศาสตร์ (Kinetics) และพลศาสตร์ (Kinematics) เหมือนกับอุปกรณ์จริง ทำให้สามารถทดสอบในสภาพแวดล้อมเสมือนก่อนจะนำไปใช้กับฮาร์ดแวร์จริงได้
QLabs Virtual มี 2 รูปแบบ ให้เลือกใช้งาน
1. Fixed Workspaces เช่น สำหรับ Qube Servo, Aero หรือ QArm ซึ่งออกแบบมาเพื่อการควบคุมเฉพาะด้านในสภาพแวดล้อมจำลองที่กำหนดไว้
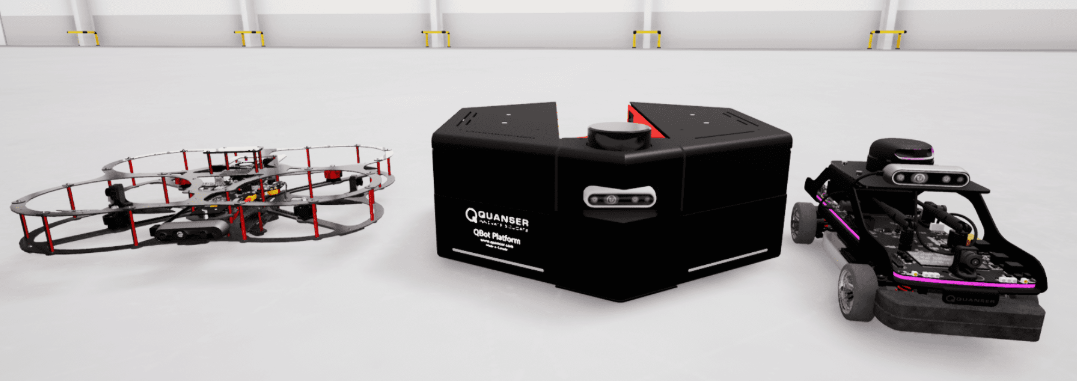
2. Open Worlds สำหรับระบบอัตโนมัติ เช่น QBot Platform, QCar 2 และ QDrone 2 โดยสามารถปรับแต่งสภาพแวดล้อมได้อย่างอิสระตามความต้องการของการวิจัย เช่น การเพิ่มสิ่งกีดขวาง สถานการณ์จำลอง หรือองค์ประกอบทางภูมิศาสตร์ต่างๆ
ระบบนี้จึงเหมาะอย่างยิ่งสำหรับการเรียนการสอน การทดลอง และการวิจัยทางด้านหุ่นยนต์และระบบอัตโนมัติ ทั้งในระดับพื้นฐานและขั้นสูง
QBot Platform เวอร์ชันเสมือนจริง (Virtual QBot Platform)
หลักสูตรของ QBot Platform ที่เผยแพร่แล้วสามารถใช้งานได้ทั้งบนอุปกรณ์จริงและในระบบเสมือนจริง ซึ่งช่วยให้นักเรียน-นักศึกษาสามารถทำแลปหรือกิจกรรมต่างๆ ได้จากที่บ้าน โดยไม่ต้องมีอุปกรณ์จริงอยู่ตรงหน้า
นักเรียนจะสามารถเข้าถึงได้ทั้งตัวหุ่นยนต์ และทรัพยากรต่างๆ ที่จำลองมาจากสภาพแวดล้อมจริงแบบครบถ้วน ภายในโลกเสมือน เช่น
• สร้างเขาวงกตเอง
• เพิ่มวัตถุต่างๆ หรือบุคคลจำลอง
• ปรับสภาพแวดล้อมได้อย่างอิสระในขนาดพื้นที่ตามต้องการ
• ทดลองการทำงานของหุ่นยนต์ในสถานการณ์ต่างๆ
ผู้ใช้ยังสามารถจำลองให้หุ่นยนต์หลายตัวทำงานร่วมกัน หรือทำงานแบบเดียวกันพร้อมกันได้ เช่น การทดสอบระบบติดตามเส้น (Line Following) พร้อมกัน 3 ตัว
จากภาพตัวอย่าง : เป็นฉากการขับเคลื่อนที่ออกแบบเอง โดยใช้แผ่นรองพื้นจำลองเสมือนจริงของ QBot Platform และให้ QBot ทั้ง 3 ตัวทำภารกิจติดตามเส้นร่วมกันในสภาพแวดล้อมเดียวกัน
3 virtual QBot Platforms running the Line Following lab. (Video at 1.33x speed)
QCar 2 เวอร์ชันเสมือนจริง (Virtual QCar 2)
QCar 2 เป็นหนึ่งในแพลตฟอร์มเสมือนจริงรุ่นล่าสุดของ Quanser ที่รองรับหลักสูตรการเรียนการสอนทั้งหมดที่ออกแบบมาสำหรับ QCar 2 แบบใช้งานจริง ซึ่งหมายความว่า แม้ในกรณีที่ห้องแลปไม่มีพื้นที่เพียงพอ หรือถูกใช้งานวิจัยอยู่ นักเรียน-นักศึกษายังสามารถทดสอบการทำงานผ่านเมืองจำลองในโลกเสมือนได้ หรือจะสร้างสภาพแวดล้อมของตนเองขึ้นมาใหม่เพื่อทดลอง QCar 2 ก็ได้เช่นกัน
ระบบเสมือนนี้สามารถ:
• จำลอง QCar 2 ขนาด 1:1 จากของจริง (ซึ่งขนาดของ QCar 2 จริงคือ 1/10 ของรถยนต์ทั่วไป)
• หรือขยายให้เป็นขนาดเท่ารถยนต์จริง (ใหญ่กว่าตัวจริง 10 เท่า) เพื่อใช้จำลองสถานการณ์การใช้งานจริง เช่น การโต้ตอบกับผู้คน ,การขับขี่ร่วมกับ QCar คันอื่น ๆ, การรับรู้ป้ายจราจร, กรวยจราจร และสัญญาณไฟจราจร ในขนาดจริง
ระบบนี้ช่วยให้ผู้เรียนฝึกฝนทักษะการขับเคลื่อนอัตโนมัติและการรับรู้สภาพแวดล้อมได้อย่างสมจริง แม้ไม่มีห้องทดลองจริงให้ใช้งาน
Virtual QCar 2 running the Vehicle Control lab. (Video at 1.33x speed)
QDrone 2 เวอร์ชันเสมือนจริง (Virtual QDrone 2)
QDrone 2 เวอร์ชันเสมือนจริง โดยช่วยลดความเสี่ยงจากการชนเสียหาย และไม่ต้องกังวลเรื่องข้อจำกัดของแบตเตอรี่! ผู้ใช้สามารถรีเซ็ตทั้งโดรนและวัตถุต่างๆ ที่เพิ่มเข้าไปในสภาพแวดล้อมเสมือนได้ตลอดเวลา ซึ่งช่วยประหยัดเวลาในการตั้งค่าระบบใหม่และซ่อมแซมอุปกรณ์เมื่อเกิดอุบัติเหตุ
ระบบเสมือนนี้สามารถ:
• ทดสอบการทำงานแบบฝูงของโดรน (Swarm Configuration)
• ทดลองอัลกอริธึมการนำทางที่ซับซ้อน
• สร้างสถานการณ์ที่มีโดรนหลายตัวทำงานร่วมกัน ได้ในสภาพแวดล้อมที่ปลอดภัย โดยไม่ต้องใช้ฮาร์ดแวร์จริง
Virtual QDrone 2 running a swarm example. (Video at 1.33x speed)
ระบบหุ่นยนต์เสมือนของ Quanser ไม่เพียงช่วยลดข้อจำกัดด้านสถานที่และอุปกรณ์ แต่ยังเปิดโอกาสให้ผู้เรียนและนักวิจัยสามารถทดลอง พัฒนา และทดสอบอัลกอริธึมได้อย่างอิสระ ปลอดภัย และยืดหยุ่นมากยิ่งขึ้น ไม่ว่าคุณจะเป็นนักศึกษา อาจารย์ หรือวิจัยด้านระบบอัตโนมัติ – โลกเสมือนนี้ คือ สนามทดลองที่ไร้ขีดจำกัด
สนใจผลิตภัณฑ์และสอบถามเพิ่มเติมติดต่อ :
คุณสาธิดา โทร. 092-282-3335
คุณลัดดาวัลย์ โทร. 092-248-9991 (ภาคตะวันออก)
หรือ Line @entech