X
- No products in the list

แพลตฟอร์มการเรียนรู้ฝึกฝนการโปรแกรมและการควบคุมหุ่นยนต์ผ่านระบบ Simulation เน้นการสร้างทักษะที่สอดคล้องกับมาตรฐาน Industrial Robotic Certifications
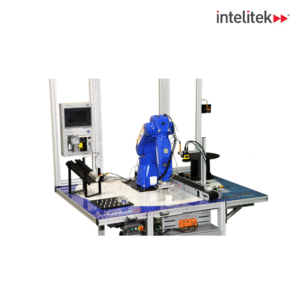
แพลตฟอร์มฝึกหุ่นยนต์และระบบอัตโนมัติที่รวมหุ่นยนต์ Yakawa GPB, PLC และระบบ Machine Vistion ไว้ในแพลตฟอร์มเดียว ออกแบบมาเพื่อสอน System Integration และการสื่อสารระหว่างอุปกรณ์ผ่านเครือข่าย Ethernet และ IoT

หลักสูตรฝึกอบรมเทคนิคการผลิตเซมิคอนดักเตอร์ที่คลอบคลุมตั้งแต่พื้นฐานการออกแบบชิปไปจนถึงการบวนการผลิต ฝึกทักษะด้วยอุปกรณ์จริงและชุดจำลองเพื่อเตรียมพร้อมสำหรับสายงานผลิตขั้นสูง

QLabs Virtual Aero 2 is a digital twin platform for aerospace and control systems education, enabling realistic labs with MATLAB/Simulink for remote learning.







