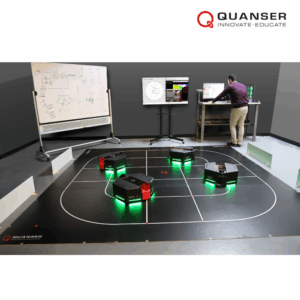
Innovative QBot Platform:
Central to the Quanser Mobile Robotics Lab are four advanced QBot Platforms, each boasting a comprehensive sensor suite, including LiDAR and an Intel RealSense camera, combined with the powerful NVIDIA Jetson Orin Nano. This setup enables detailed activities around the fundamentals of localization, path planning, and navigation extending into obstacle avoidance, and applications of multiagent systems and applied AI.
Comprehensive Turn-Key Solution with Educational Courseware:
A complete package, the lab includes tailored courseware in Python and MATLAB Simulink with practical research examples to give academics a head-start in the implementation of their research applications. This ensures a seamless bridge between theoretical knowledge and real-world application, as well as resources that complement progressive approaches to pedagogy including project-based learning and hybrid teaching.
Versatile Development Support & Open Architecture:
Offering unparalleled development flexibility across ROS, Python, MATLAB Simulink, and C++, the lab allows for the use of several programming environments. Its open architecture further enables unparalleled access to the core operation of the lab systems and QBot Platforms align the operation of the lab systems to far-reaching educational and research objectives.
High-Fidelity Digital Twin for Advanced Learning:
With high-fidelity digital twins available, students and researchers can design, test, and refine their robotics applications in a risk-free environment. This enhances learning and experimentation, ensuring concepts are fully understood before physical implementation.
• 4 x QBot Platforms
• 1 x Template map (4′ x 4′)
• 1 x Reconfigurable environment (12′ x 12′)
• 8 x Batteries
• 4 x Battery chargers and charge cables
• 4 x Game controllers
• 1 x Router
• 1 x Pre-configured ground station PC
• 1 Year Subscription to QLabs Virtual QBot Platform
• QUARC lab license
• Intro to Mobile Robotics content
• Self-localization and state estimation
• Autonomous Mobile Robots (AMRs)
• Multi-agent collaboration & swarming
• Simultaneous Localization & Mapping
• Applied AI & Machine Learning
• Path Planning & Navigation
• Patrolling & Surveying
• Behavior architectures & decision making
• Sensors & Actuators Interfacing
• Forward/Inverse Differential Kinematics
• Image/Lidar Acquisition, Calibration & Processing
• Obstacle Detection
• Self Localization & State Estimation
• Path Planning & Navigation
• Task Queue Generation & Execution
• Multi-agent Task Distribution and Collaboration