X
- No products in the list
Qube-Servo 3 คือ ชุดทดลองที่ช่วยให้นักศึกษาเข้าใจระบบควบคุมได้เร็วที่สุด ผ่านการเรียนรู้แบบลงมือทำจริง เหมาะสำหรับใช้ในรายวิชา Control Systems ตัวระบบมาพร้อมมอเตอร์กระแสตรงแบบขับตรง (Direct-Drive Brushed DC Motor) คุณภาพสูง เอ็นโค้ดเดอร์ 2 ตัว ระบบเก็บข้อมูลภายใน (Data Acquisition) และแอมพลิฟายเออร์ในตัว สามารถเชื่อมต่อกับคอมพิวเตอร์ Windows ผ่านพอร์ต USB และใช้งานร่วมกับ MATLAB Simulink หรือ Python ได้ทันที
Qube-Servo 3 เป็นส่วนหนึ่งของชุดทดลอง Control Systems & Dynamics Lab Collection – Introduction to Controls Teaching Lab ซึ่งออกแบบมาเพื่อการเรียนการสอนระบบควบคุมโดยเฉพาะ
คุณสมบัติเด่น
• ปลอดภัยในการใช้งาน มีระบบป้องกันมอเตอร์หยุดนิ่ง (Motor Stall) และป้องกันความร้อนสูงเกินอัตโนมัติ
• เนื้อหาการเรียนครบถ้วน Courseware ที่สอดคล้องกับมาตรฐาน ABET และเชื่อมโยงกับตำราระบบควบคุมยอดนิยม
• อุปกรณ์เสริมพร้อมใช้งาน มาพร้อมแผ่น Inertia Disk และโมดูลลูกตุ้ม (Pendulum) ในชุด
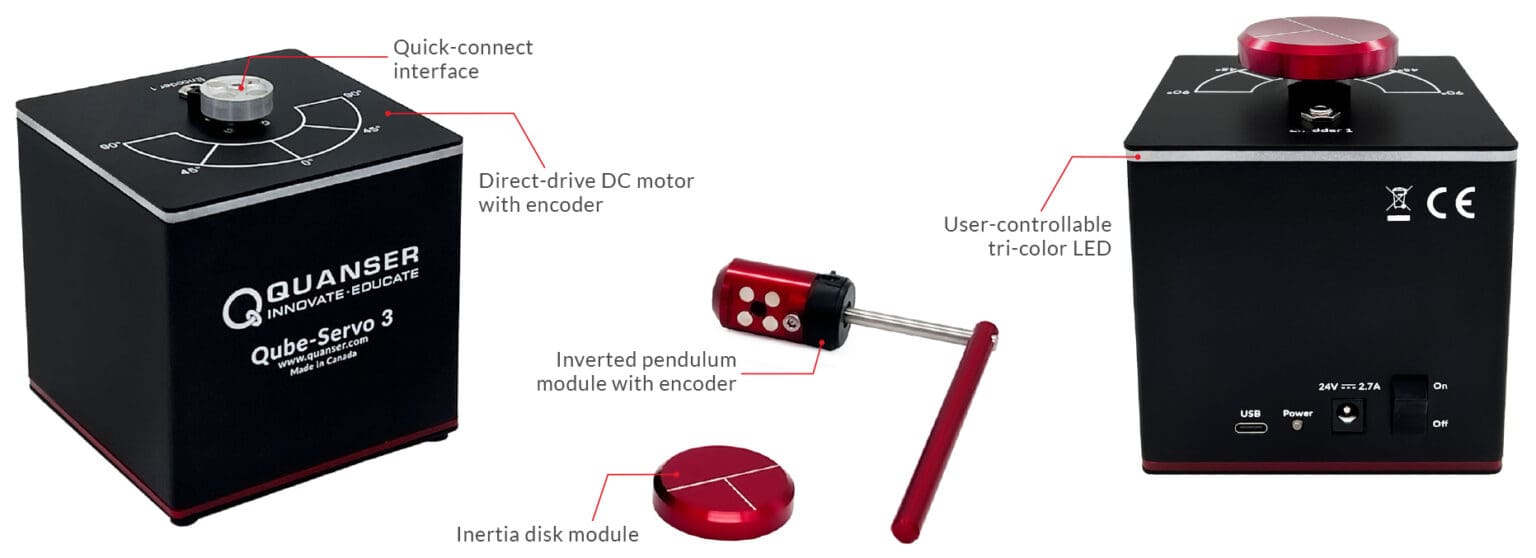
Qube-Servo 3 มาพร้อมแผ่นโมเมนต์ความเฉื่อย (Inertia Disk) และโมดูลลูกตุ้มกลับหัว (Inverted Pendulum) แบบติดตั้งรวดเร็ว นอกจากนี้ ผู้ใช้ยังสามารถออกแบบและพิมพ์ชิ้นส่วนเสริมด้วยเครื่องพิมพ์ 3 มิติ เพื่อขยายขอบเขตการทดลอง หรือใช้เป็นโครงงานของนักศึกษาได้อีกด้วย
ระบบรองรับชุดเนื้อหาการเรียนการสอนที่สอดคล้องกับมาตรฐาน ABET สำหรับการใช้งานร่วมกับ MATLAB® Simulink® ผู้สอนสามารถเลือกใช้ตัวควบคุมที่มีให้ หรือออกแบบและทดสอบตัวควบคุมของตนเองได้ อีกทั้งยังรองรับการเขียนโปรแกรมด้วย Python และ C/C++ โดยฟีเจอร์ใหม่ช่วยให้สามารถปิดการชดเชยเดดแบนด์ (Deadband Compensation) เพื่อให้สามารถสร้างแบบจำลองและควบคุมมอเตอร์ DC ได้อย่างสมจริงยิ่งขึ้น
โมดูลแผ่นโมเมนต์ความเฉื่อย (Inertia Disk Module)
• การเชื่อมต่อและใช้งานฮาร์ดแวร์ (Hardware Integration)
• โมเมนต์ความเฉื่อย (Moment of Inertia)
• การกรองสัญญาณ (Filtering)
• การสร้างแบบจำลองการตอบสนองแบบสเต็ป (Step Response Modeling)
• การสร้างแบบจำลองด้วยบล็อกไดอะแกรม (Block Diagram Modeling)
• การประมาณค่าพารามิเตอร์ของระบบ (Parameter Estimation)
• การสร้างแบบจำลองการตอบสนองเชิงความถี่ (Frequency Response Modeling)
• การสร้างแบบจำลองแบบสเตตสเปซ (State-Space Modeling)
• การระบุแรงเสียดทานของระบบ (Friction Identification)
• การวิเคราะห์เสถียรภาพของระบบ (Stability Analysis)
• ระบบอันดับสอง (Second-Order Systems)
• เกณฑ์เสถียรภาพแบบ Routh-Hurwitz
• เกณฑ์เสถียรภาพแบบ Nyquist
• การควบคุมแบบ PD (PD Control)
• ตัวชดเชยแบบลีด (Lead Compensator)
• การควบคุมแบบสัดส่วน (Proportional Control)
• ค่าความคลาดเคลื่อนในสภาวะคงตัว (Steady-State Error)
• การรบกวนจากภาระโหลด (Load Disturbance)
• ความทนทานของระบบควบคุม (Robustness)
• การควบคุมเชิงเหมาะที่สุด (Optimal Control)
• บทนำสู่การควบคุมแบบไม่ต่อเนื่อง (Introduction to Discrete Control)
• การออกแบบการควบคุมแบบไม่ต่อเนื่อง (Discrete Control Design)
• เสถียรภาพของระบบควบคุมแบบไม่ต่อเนื่อง (Discrete Control Stability)
โมดูลลูกตุ้ม (Pendulum Module)
• โมเมนต์ความเฉื่อย (Moment of Inertia)
• การสร้างแบบจำลองลูกตุ้ม (Pendulum Modeling)
• การสร้างแบบจำลองแบบสเตตสเปซ (State-Space Modeling)
• การควบคุมการทรงตัวของลูกตุ้ม (Pendulum Balance Control)
• การควบคุมลูกตุ้มให้แกว่งขึ้น (Swing-Up Control)
• การควบคุมการทรงตัวแบบ LQR ด้วยสเตตฟีดแบ็ก (LQR State-Feedback Balance Control)
• การควบคุมการทรงตัวแบบกำหนดตำแหน่งโพล (Pole-Placement State-Feedback Balance Control)

สำหรับใช้ในการทดลอง ไม่ว่าจะเป็นด้านพลศาสตร์ของโครงสร้าง การจำลองการเคลื่อนไหว การศึกษาการสั่นสะเทือน สามารถประยุกต์ใช้กับเทคโนโลยีในการกายภาพบำบัด รวมถึงการวิจัยในอีกหลากหลายรูปแบบ

QLabs Virtual Ball and Beam is a digital twin platform for control systems education, enabling realistic unstable control experiments with MATLAB/Simulink.

QLabs Virtual Aero 2 is a digital twin platform for aerospace and control systems education, enabling realistic labs with MATLAB/Simulink for remote learning.

QLabs Virtual Qube-Servo 3 is a digital twin platform for control systems education, enabling realistic labs with MATLAB/Simulink for remote and blended learning.