X
- No products in the list
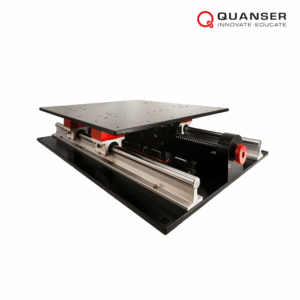
Quanser Shake Table II is a single-axis motion simulator for studying structural dynamics, earthquake engineering, and vibration effects on buildings.
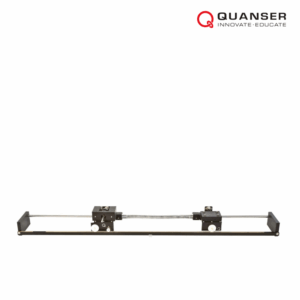
Linear Flexible Joint experiment teaches dynamics and vibration control using a mass-spring system for control systems and mechatronics education.
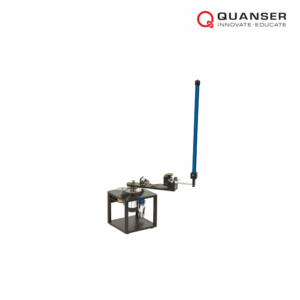
Rotary Inverted Pendulum is a classic control systems experiment for teaching modeling, swing-up control, and stabilization in engineering education.

รถยนต์ขนาดเล็กพร้อมเซ็นเซอร์ครบ เช่น LiDAR, กล้อง, IMU และประมวลผลด้วย NVIDIA® Jetson™ Nano รองรับ ROS และ MATLAB/Simulink สภาพแวดล้อมจำลองสำหรับการทดลองเสมือนจริง





