X
- No products in the list


3 DOF Helicopter is an advanced aerospace control experiment for studying flight dynamics and control of a tandem rotor helicopter system.
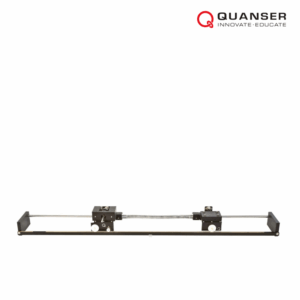
Linear Flexible Joint experiment teaches dynamics and vibration control using a mass-spring system for control systems and mechatronics education.

Quanser Rotary Double Inverted Pendulum is an advanced control systems experiment for studying stabilization and complex dynamics in engineering education.
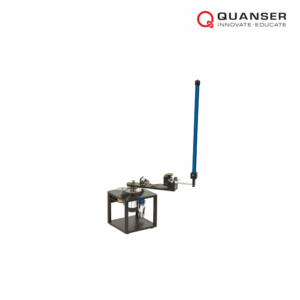
Rotary Inverted Pendulum is a classic control systems experiment for teaching modeling, swing-up control, and stabilization in engineering education.

QLabs Virtual Rotary Servo is a digital twin platform for control systems education, enabling realistic DC motor control labs with MATLAB/Simulink.

Quanser Rotary Servo Base Unit is a modular control experiment platform for teaching servo motor control concepts using a DC motor and encoder.
บริษัท เอ็นเทค อินดัสเทรียล โซลูชั่น จำกัด
17/121 ซอยงามวงศ์วาน 47 แยก 48 แขวงทุ่งสองห้อง
เขตหลักสี่ กรุงเทพฯ 10210